
The Goal
The objective of DOGE was to enable Solo12, a quadruped robot, to dynamically detect and evade incoming projectiles in real-time.
Standard evasion systems often rely on heavy computation or traditional frame-based cameras, which suffer from motion blur and higher latency. My goal was to create a highly reactive system that could:
- Perceive in High-Speed: Utilize an event-based camera to track fast-moving objects with microsecond latency.
- Learn Dynamic Agility: Move beyond static path planning by using Model-Based Reinforcement Learning to teach the robot agile dodging maneuvers.
- Operate in Real-Time: Integrate high-frequency motor control (100Hz) with the vision system.
The How
I developed a comprehensive framework integrating state-of-the-art AI with custom robotics drivers.
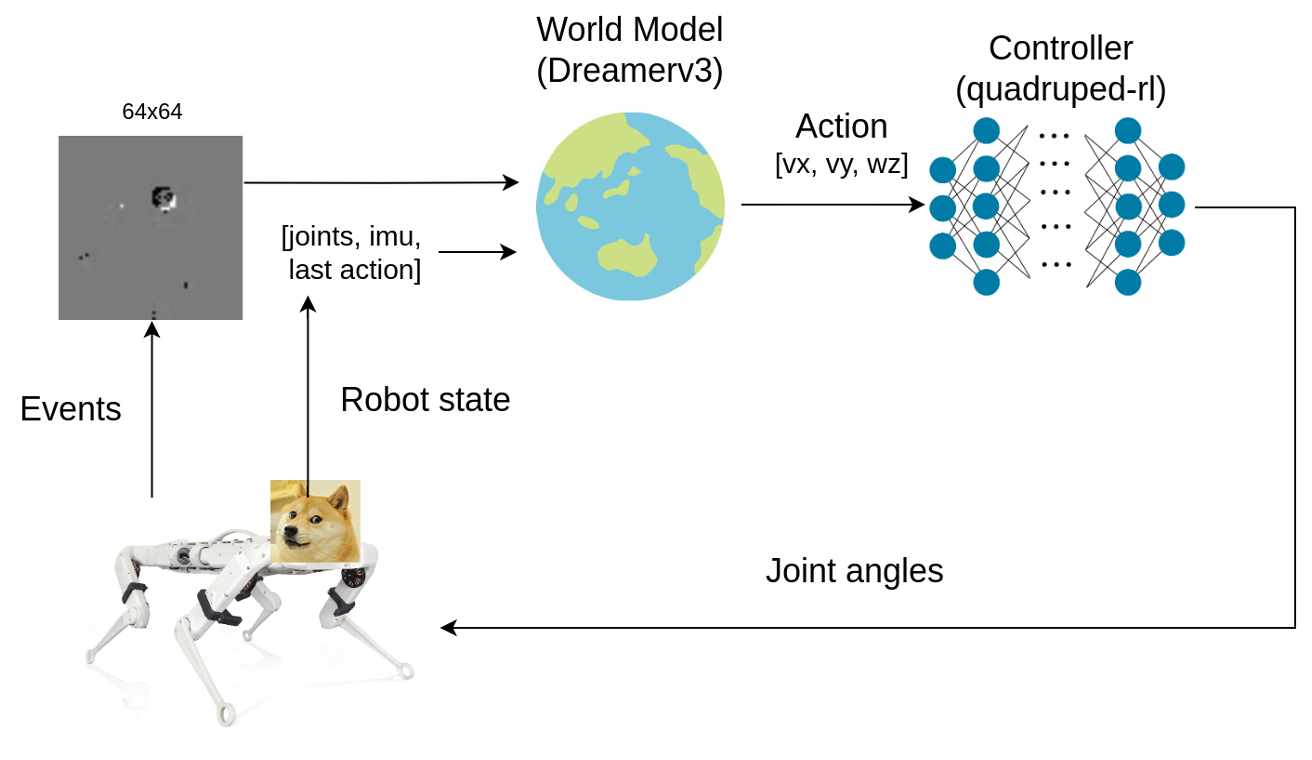
- Model-Based RL (DreamerV3): I leveraged the DreamerV3 world model to train the agent in the Mujoco simulation. Unlike model-free approaches, DreamerV3 learns an internal model of the environment, allowing it to imagine future outcomes and learn efficient policies for dodging projectiles with high sample efficiency.
- Locomotion Controller: The system controls the Solo12 robot using a deep reinforcement learning-based controller. It accepts high-level velocity commands (forward, lateral, and rotational) and outputs precise joint angles at 100Hz, ensuring smooth and rapid physical responses.
- Sim-to-Real Strategy: I employed Domain Randomization during simulation training. This involved varying projectile sizes, speeds, launch distances, and angles, as well as injecting noise into the robot’s state sensors (IMU, joint encoders) to mimic real-world hardware imperfections.
The Results
The project successfully demonstrated the potential of model-based RL for dynamic quadruped agility.

Simulation results from the event-based camera
Simulation results in Mujoco
- Simulation Success: The DreamerV3 agent successfully learned a robust policy in simulation, capable of consistently dodging incoming projectiles by coordinating body movement and orientation.
- Open Source Contribution: A ROS 2 wrapper for the event-based camera was released as an open-source tool, facilitating easier integration of neuromorphic vision sensors for the wider robotics community.
- Sim-to-Real Challenges: While the policy performed well in simulation, the direct transfer to the physical Solo12 robot faced a significant sim-to-real gap. The real-world physics and sensor noise profiles proved distinct enough that the policy requires further refinement.
- Future Work: Identifying pathways for bridging this gap include more aggressive domain randomization and sophisticated reward shaping to encourage more stable real-world behaviors.